2016年8月4日、東京大学 武田先端知ビル5階の武田ホールで、技術研究組合 国際廃炉研究機構(IRID)主催による「IRIDシンポジウム2016 in 東京」が開催された。午前中に開催された第1部は講演が行われ、午後の第2部はロボット展示やデモ、パネル展示が行われた。

第1部では、IRIDの剱田裕史理事長からの挨拶の後、来賓として経済産業省 資源エネルギー庁原子力事故災害対処審議官の平井裕秀氏より挨拶があった。
それに続いて、東京電力ホールディングス株式会社 常務執行役の増田尚宏氏より「福島第一原子力発電所の廃炉を取り巻く状況と課題」という題で講演が行われた。増田氏は、福島第一原発の現在の状況や、作業環境について紹介したあと、汚染水対策、使用済み燃料プールからの燃料取り出し、燃料デブリの取り出しについての説明があった。原発の4号機はすでに使用済燃料プールからの燃料取り出しが完了しているが、1?3号機はこれからだ。ただ、各号機とも安定した状態は継続していること(水位や圧力、温度などのプラント・パラメーターは24時間365日の監視を継続中)、海域のサンプリングやモニタリングにより、大気中への放射線物質放出量や、港湾内外の放射線濃度は大幅に低減しているそうだ。

福島第一原子力発電所 1号機から4号機の現状
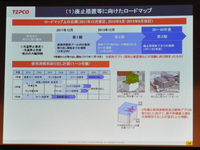
廃炉計画のロードマップ
なお、福島第一原発では現在でも1日あたり約6000人の方が働いているが、除染作業も進んでおり、管理区域を区分けすることによって、作業員の装備の軽装化も進んでいる。まだフルフェイスマスクが必要なところもあるが、ハーフフェイスマスク、一般服での作業が可能な場所も増えてきている。作業員の被ばく線量も低下しており、労働環境の整備も行われ、労働環境は改善されてきているそうだ。
汚染水については汚染水の処理や除去、汚染源に地下水を近づけないための陸側の遮水壁の設置などもすんでいる。あとは汚染水を漏らさないために、貯蔵するタンクのリプレースや増設を計画しているという。
使用済み燃料プールからの燃料取り出しについては、1?3号機の作業がこれからである。すでに作業が終了している4号機に比べ、放射線量が高いという問題があり、遠隔操作機器の活用や除染、遮蔽体の設置などの対策を検討し、実施していくそうだ。
燃料デブリの取り出しについては、まずは原子炉建屋内の状況やデブリの位置を確認することが必要である。現在もロボットを活用した格納容器内の調査や、素粒子の一種であるミュオンを用いて圧力容器内の調査を行っている。その結果に基づいて燃料デブリの取り出し方法を検討していくことになる。福島第一原発での燃料デブリ取り出しは、誰も経験したことのない困難な作業となるため、できるだけたくさんの情報発信を行い、原子力分野に限らない、役に立つ技術やアイデアを歓迎したいとのこと。また、これからの作業を進めるにあたっては作業員の被ばくと一般の方々のリスクの低減を考慮した意思決定が必要になるとのこと。
情報発信については、福島第一原発の状況を容易に確認できるデータの提供や、地元とのコミュニケーションの取り方についても説明があった。
次に、IRID開発計画部長の桑原浩久氏による「IRIDが取り組む研究開発の概要」という題で、IRIDで現在行われている研究開発プロジェクトの説明が行われた。IRIDでは、格納容器や圧力容器内の調査や、格納容器の補修・止水技術、燃料デブリの取り出し技術など、全部で14のプロジェクトが進行している。燃料デブリの取り出しに関わる研究開発が12と最も多い。
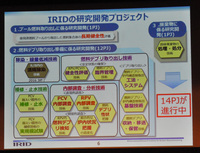
IRIDで進められている研究開発プロジェクト
燃料デブリの取り出し作業については、1.建屋内の線量を下げる、2.デブリの状態を知る、3.格納容器の漏えいを止める、水を張る、4.格納容器に水を張る、5.デブリを取り出す、6.デブリを運び出して保管するという一連の作業が必要だ。各工程ごとに必要とされる技術についての説明や、現在開発が進められている技術についての紹介が行われた。
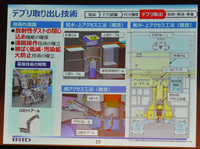
燃料デブリの取り出し技術
これらの技術開発は「現場をよく知ること」が第一歩となる。しかし、福島第一原発の現場は放射線量が高く、調査には被ばくが伴う。ロボット等を投入して調査をすすめているものの、情報としてはどうしても限られる。そのため、現場の状況に応じた柔軟な対応ができるロバストな研究開発をすることが重要と締めくくった。
最後の講演は、IRIDの副理事長であり、芝浦工業大学教育イノベーション推進センターの新井民夫教授による「ロボットが担う廃炉技術-研究に励むみなさんに期待すること-」であった。新井教授は廃炉措置計画について、過酷な環境に、多分野の複合技術で立ち向かう必要があること、また未踏分野であり、30-40年程度の長期にわたる作業となるとし、3-6世代の研究者が関わっていくことになるとした。しかし、同一のテーマで長期間研究を続けることは難しいことについて理解してほしいとした。また、廃炉というのは社会の問題でもあり、予算やリソースなどに制約があること、研究開発は国の仕事だが、東京電力が廃炉作業を進めること、廃炉は社会的な課題として位置づけられているとした。
廃炉作業に向けたロボットについては、すでに開発され、原発の現場でも運用されているものを紹介した。ただ、作業が進むにつれて、使用するロボットへの課題はたくさんある。放射性物質によるリスクから人や環境を守らなければならないが、そこにはロボットも入る。人が近づけない高い放射線環境の中での作業するためのロボットであるが、搭載している電子機器などへの影響は免れないからだ。また、現場の状況は不明なところも多く、アクセスできる空間や使用できるリソースも制限がある。作業計画は立てなければならないが、想定ベースとなり、開発途中での仕様変更などにも柔軟に対応できるようにしなければならない。多様な現場に対応するために、センサや駆動系など、汎用的なものを組み合わせることができれば、ロボットの開発もより早く進むが、現状ではそれぞれの目的に応じて開発している状況である。また、今後はさらに見えない部分を想像しながら予測をし、確率論的な開発をしていく必要があるだろうとした。
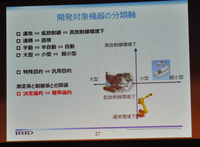
廃炉作業のための開発対象機器の分類
また、現在の日本のロボット技術において、弱いのはシステム統合技術、シミュレーション、データベース関連であると考えているそうだ。しかし、長い期間、さまざまなの人々が集まる廃炉作業には大変重要な技術となるため、これらの技術やマンマシンインタフェースに力を入れていくことが必要だと考えているそうだ。また、社会問題としてとらえると、人材の育成や産業応用、社会との合意形成や、プロジェクト管理も重要であると語った。
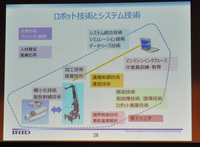
ロボット技術とシステム技術
そのうえで、IRIDと大学との連携についても触れた。IRIDの事業内容の中には、研究開発に関する人材育成への取組みがある。人材育成がやりやすい環境を作り、材料を提供していくことだ。たとえば、原子炉格納容器、原子炉圧力容器の内部調査や分析、評価技術を体系化した教科書を作ることだ。しかし、これだけではなく、IRIDで進められているプロジェクトのうち、大学等他の研究機関の力を借りたい研究開発ニーズを集約・分類した。これをもとに、IRID受託プロジェクト内での、受託企業から大学への委託研究や、IRIDから大学への委託研究が行われている。また、文部科学省との連携や、IRIDの主催でワークショップ等も開催されているそうだ。
繰返しになるが、廃炉措置の研究開発は、多分野の複合技術が必要で、長い期間がかかる、未踏分野である。学生や社会人としては、社会の技術としての科学技術を広範に眺める力を持つこと、研究者としては社会科学的視点を理解することなど、それぞれの立場に向けての期待と、廃炉は世代をまたいだ長期事業となるため、今後の担い手になる学生たちにむけて力をあわせようというメッセージを送った。
午後の第2部はステージでロボットの展示、デモが行われ、その他にパネル展示も行われた。ステージでは「クローラ型遠隔操作調査ロボット」(開発担当:株式会社東芝)「形状変化型遠隔操作調査ロボット」「遠隔操作用柔構造ロボット」(両方とも開発担当は日立GEニュークリア・エナジー株式会社)が実機で展示。デモも行われた。

 東芝が開発を担当した「クローラ型遠隔操作調査ロボット」。原子炉格納容器内部調査に使用するロボットで、格納容器に挿入するときは直線形状になり、調査時には後方のカメラを起こしてサソリのような形状に変形する。後方に追加照明として集光LEDを搭載しており、霧滴中における視認性が向上。耐放射線性は積算で1000Gy以上だ。2016年度内を目標に2号機に投入し、格納容器内の調査を実施する予定。なお、小誌2015年11月号「日本を救う災害対応ロボットの現状と未来」でも紹介している。
東芝が開発を担当した「クローラ型遠隔操作調査ロボット」。原子炉格納容器内部調査に使用するロボットで、格納容器に挿入するときは直線形状になり、調査時には後方のカメラを起こしてサソリのような形状に変形する。後方に追加照明として集光LEDを搭載しており、霧滴中における視認性が向上。耐放射線性は積算で1000Gy以上だ。2016年度内を目標に2号機に投入し、格納容器内の調査を実施する予定。なお、小誌2015年11月号「日本を救う災害対応ロボットの現状と未来」でも紹介している。
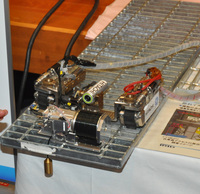 日立GEニュークリア・エナジーが開発を担当した「形状変化型遠隔操作調査ロボット」。こちらも原子炉格納容器内部調査に使用するロボット。2015年に4月に1号機で調査を実施したロボットをベースに機能を追加する。このロボットもガイドパイプを走行するときには直線形状となり、グレーチング走行時はコの字型に変形する。ベースとなるロボットに、計測ユニットをつないでいるウインチを搭載する。グレーチングの隙間から計測ユニットを降ろし、水中における放射線量率の計測や、カメラによる目視での調査を行う。
日立GEニュークリア・エナジーが開発を担当した「形状変化型遠隔操作調査ロボット」。こちらも原子炉格納容器内部調査に使用するロボット。2015年に4月に1号機で調査を実施したロボットをベースに機能を追加する。このロボットもガイドパイプを走行するときには直線形状となり、グレーチング走行時はコの字型に変形する。ベースとなるロボットに、計測ユニットをつないでいるウインチを搭載する。グレーチングの隙間から計測ユニットを降ろし、水中における放射線量率の計測や、カメラによる目視での調査を行う。
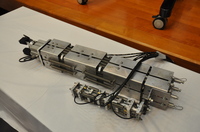 日立GEニュークリア・エナジーが開発を担当した「遠隔操作用柔構造ロボット」。燃料デブリ・炉内構造物を遠隔操作で取り出す際に使用するロボットで、ばねと、水圧のシリンダーで駆動。さまざまな駆動系などの部品と組み合わせることで、いろいろな用途に対応できるのが特徴。
日立GEニュークリア・エナジーが開発を担当した「遠隔操作用柔構造ロボット」。燃料デブリ・炉内構造物を遠隔操作で取り出す際に使用するロボットで、ばねと、水圧のシリンダーで駆動。さまざまな駆動系などの部品と組み合わせることで、いろいろな用途に対応できるのが特徴。
パネルは、IRIDでの技術開発だけではなく大学や高専等で行われている研究についても展示が行われていた。
 芝浦工業大学の「RSNP(Robot Service Network Protcol)による複数移動ロボットの遠隔操作」。RSNPはサービスロボット用の共通の通信規格で、これを利用することで、操作者1名で複数台のロボットの操作を可能にしたリ、複数台のロボットが協調して移動させることを目的に、追尾機能を持つ協調移動制御システムの構築を行っている。除染作業に携わるロボットの標準化にもつながる。デモでは、大学に置いているロボットを、シンポジウム会場から操作を行っていた。ノートパソコンの画面は、操作しているロボットからの目線。
芝浦工業大学の「RSNP(Robot Service Network Protcol)による複数移動ロボットの遠隔操作」。RSNPはサービスロボット用の共通の通信規格で、これを利用することで、操作者1名で複数台のロボットの操作を可能にしたリ、複数台のロボットが協調して移動させることを目的に、追尾機能を持つ協調移動制御システムの構築を行っている。除染作業に携わるロボットの標準化にもつながる。デモでは、大学に置いているロボットを、シンポジウム会場から操作を行っていた。ノートパソコンの画面は、操作しているロボットからの目線。
本シンポジウムは、「廃炉の未来を担う」と銘打っていたこともあり、講演をした方々も若手研究者や学生たちに向けたメッセージを送っていた。誰も経験したことのない現場であり、長期間にわたる取り組みとなる。現在携わっている研究者だけでなく、次世代の研究者も重要になってくるため、ともに力をあわせていこうと呼びかけていた。