タミヤプラモデルファクトリー新橋店にて、3月24日から2日間にわたり「タミヤロボットスクールフェア2018」が開催された。同イベントは、株式会社タミヤの協力のもと、4月から正式に開校される「タミヤロボットスクール」を運営している株式会社ナチュラルスタイルの主催で行われた。
タミヤはプラモデル、ラジコン、ミニ四駆など、幅広く商品展開しているトップブランドで、2017年8月に「カムプログラムロボット工作キット」を発売。「タミヤロボットスクール」は、この「カムプログラムロボット工作キット」を教材とする「ロボットプログラミングコース」、「リモコンロボット製作セット(タイヤタイプ)」「アームクローラー工作セット」「ぷるぷるテントウムシ」を教材とする「メカニックコース」の2つのコースから成る。
 タミヤ・カムプログラムロボットを使ったプログラミング教材
タミヤ・カムプログラムロボットを使ったプログラミング教材
24日には「ロボットプログラミング体験会」が、25日には「メカニック体験会」「ロボットバトル日本一決定戦!」が行われて、多数の小学生が集まった。今回行われた「ロボットバトル日本一決定戦!」は、正式開校になる以前からプレで始まっている各地の「メカニックコース」の受講生たち(岐阜県・愛知県、宮城県、東京都の小学生)によるロボットコンテストだ。
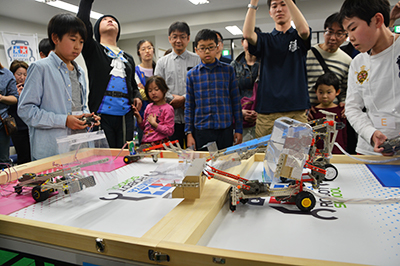
ルールはステージに置かれたペットボトルのキャップ(黄緑5点、青3点、白1点)を自陣から相手の陣地に移して、3分間の試合が終わった際に、最終的に自陣のキャップの総合点が少なかった方が勝ち、というものだ。各チームとも1人1台、2人組2台の機体で戦う。各機体は基本的にはタミヤの「リモコンロボット製作セット(タイヤタイプ)」から作ったザリガニロボットをベースにしたものだが、試合開始時にステージスタート地点の枠内に収まっている条件を満たしていれば、その後展開して大きくなるような構造をとってもかまわず、キャップの取込み機構、相手陣地への投げ込み機構を含めて、バラエティに富んだ機体が集まった。
 ステージの様子。写真手前から黄緑が2個、青3個、白10個のキャップが置かれている。
ステージの様子。写真手前から黄緑が2個、青3個、白10個のキャップが置かれている。
とにかくキャップを取っては相手陣地に投げ込む機体もあれば、キャップを自らに取り込んで、試合終了ぎりぎりまで持っていて、最後の最後で投げ込む機体もあった。
「メカニックコース」のカリキュラムは、元々岐阜県でものづくり活動を教える活動を続けていた、特定非営利活動法人Meets Visionのカリキュラムをベースにしたもので、今回のロボットコンテストもMeets Visionが7年にわたり続けてきたロボコンにのっとっている。岐阜県で行われているロボコンでは、毎回100人を超える参加者がしのぎを削っている、ということで、今回参加した宮城、東京の小学生たちは、百戦錬磨の岐阜・愛知勢の胸を借りて挑戦するかたちとなった。
計7チームの総当たり戦の予選では、当初の予選に反して強豪の岐阜・愛知勢を宮城、東京のチームが破る金星もあったが、決勝に残ったのは岐阜・愛知勢3チーム、宮城1チームの4チームだった。決勝は岐阜・愛知勢どうしの戦いとなり、接戦の末、野原大輔君・松尾和椰君チームが勝利を勝ち取った。優勝が決まった瞬間、同チームが思わずうれし泣きをしてしまった姿は、小学生がここまで1つのことに打ち込み熱くなれるものなのか、と思わせる印象的なシーンだった。
 緊迫した決勝戦の様子。
緊迫した決勝戦の様子。
小誌ではさまざまなロボットキットやプログラミングスクールを取り上げているが、全国71校を正式開校する「タミヤロボットスクール」についても追い続けていきたい。